X is a bounded subset of the plane, the convex hull may be visualized as the shape formed by a rubber band stretched around X.
 The convex hull of a set X of points in the Euclidean plane is the smallest convex set that contains X. when
The convex hull of a set X of points in the Euclidean plane is the smallest convex set that contains X. when
Formally, the convex hull may be defined as the intersection of all convex sets containing X or as the set of all convex combinations of points in X.
A set of points is defined to be convex if it contains the line segments connecting each pair of its points. The convex hull of a given set X may be defined as
void convexHull(InputArray points, OutputArray hull, bool clockwise=false, bool returnPoints=true )
Parameters:
http://en.wikipedia.org/wiki/Convex_hull
Formally, the convex hull may be defined as the intersection of all convex sets containing X or as the set of all convex combinations of points in X.
A set of points is defined to be convex if it contains the line segments connecting each pair of its points. The convex hull of a given set X may be defined as
- The (unique) minimal convex set containing X
- The intersection of all convex sets containing X
- The set of all convex combinations of points in X.
void convexHull(InputArray points, OutputArray hull, bool clockwise=false, bool returnPoints=true )
Parameters:
- points – Input 2D point set, stored in std::vector or Mat.
- hull – Output convex hull. It is either an integer vector of indices or vector of points. In the first case, the hull elements are 0-based indices of the convex hull points in the original array (since the set of convex hull points is a subset of the original point set). In the second case, hull elements are the convex hull points themselves.
- hull_storage – Output memory storage in the old API (cvConvexHull2 returns a sequence containing the convex hull points or their indices).
- clockwise – Orientation flag. If it is true, the output convex hull is oriented clockwise. Otherwise, it is oriented counter-clockwise. The assumed coordinate system has its X axis pointing to the right, and its Y axis pointing upwards.
- orientation – Convex hull orientation parameter in the old API, CV_CLOCKWISE or CV_COUNTERCLOCKWISE.
- returnPoints – Operation flag. In case of a matrix, when the flag is true, the function returns convex hull points. Otherwise, it returns indices of the convex hull points. When the output array is std::vector, the flag is ignored, and the output depends on the type of the vector: std::vector<int> implies returnPoints=true, std::vector<Point> implies returnPoints=false.
Example:
------------#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat src; Mat src_gray;
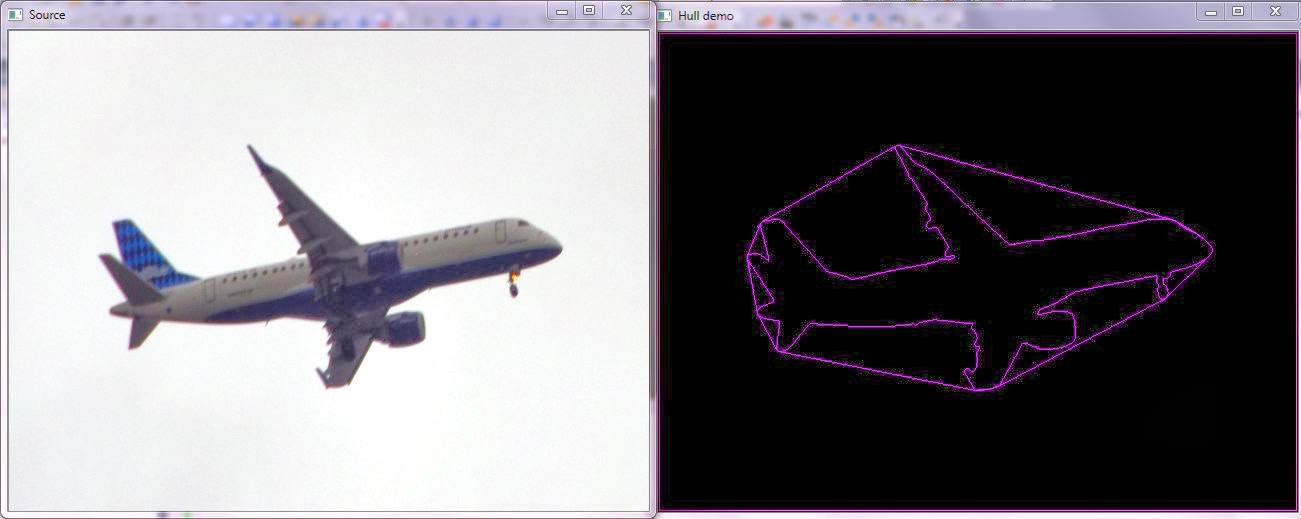
src = imread( "airplane1.jpg", 1 );
resize(src, src, Size(640,480), 0, 0, INTER_CUBIC);
cvtColor( src, src_gray, CV_BGR2GRAY );
blur( src_gray, src_gray, Size(3,3) );
namedWindow( "Source", CV_WINDOW_AUTOSIZE );
imshow( "Source", src );
// Convex Hull implementation
Mat src_copy = src.clone();
Mat threshold_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
// Find contours
threshold( src_gray, threshold_output, 200, 255, THRESH_BINARY );
findContours( threshold_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
// Find the convex hull object for each contour
vector<vector<Point> >hull( contours.size() );
for( int i = 0; i < contours.size(); i++ )
{ convexHull( Mat(contours[i]), hull[i], false ); }
// Draw contours + hull results
RNG rng;
Mat drawing = Mat::zeros( threshold_output.size(), CV_8UC3 );
for( int i = 0; i< contours.size(); i++ )
{
Scalar color = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) );
drawContours( drawing, contours, i, color, 1, 8, vector<Vec4i>(), 0, Point() );
drawContours( drawing, hull, i, color, 1, 8, vector<Vec4i>(), 0, Point() );
}
// Show in a window
namedWindow( "Hull demo", CV_WINDOW_AUTOSIZE );
imshow( "Hull demo", drawing );
waitKey(0);
return(0);
}
------------Result:
Sources:
http://en.wikipedia.org/wiki/Convex_hull
applets for java for starters
ReplyDeleteInvestment is one of the best ways to achieve financial freedom. For a beginner there are so many challenges you face. It's hard to know how to get started. Trading on the Cryptocurrency market has really been a life changer for me. I almost gave up on crypto at some point not until saw a recommendation on Elon musk successfully success story and I got a proficient trader/broker Mr Bernie Doran , he gave me all the information required to succeed in trading. I made more profit than I could ever imagine. I'm not here to converse much but to share my testimony, I recovered my losses and I have made a total profit returns of $20,500 from an investment of just $2000 within 1 week. Thanks to Mr Bernie I'm really grateful,I have been able to make a great returns trading with his signals and strategies .I urge anyone interested in INVESTMENT to take bold step in investing in the Cryptocurrency Market, he can also help you recover your lost funds, you can reach him on WhatsApp : +1(424) 285-0682 or his Gmail : BERNIEDORANSIGNALS@GMAIL.COM tell him I referred you
DeleteCounselors. Our counselors have been logging in hours to connect with our families and also learn new skills. Tiffany has been working hard to fast track her College Counseling know how to b ready to support the Class of 2025. JJR has been working furiously to resolve and smooth out the final programming bumps and glitches - and both them are now shouldering larger counseling caseloads now that our guidance department is half the size!
ReplyDeleteحشرات
النمل الابيض
التخلص من النمل
ابادة حشرات
يصعب على الأفراد مؤسسة مكافحة البق بمهد الذهب كسائر الحشرات داخل البيت و بالأساليب العادية حيث أن البق كما قد سلف ذكره تسكن في المفروشات و العائلة و من ثم يصعب بخ المبيدات على أماكن السبات لهذا اذا وجدت حشرة البق تسكن منزلك فعليك التواصل بنا ليتم مكافحتها بواسطة شركتنا بأحدث الأساليب فنحن لدينا أجدد تقنيات مؤسسة مكافحة البق بمهد الذهب و الحشرات بالأجهزة و المعدات التي يسهل عليها الوصول لأضيق الأماكن دون الاحتياج لنقل الأثاث لموضع أخر أو تفريغ القاعات كما أننا نعتمد في مؤسسة مكافحة البق بمهد الذهب تحديدا و بقية الحشرات على مواد كيميائية تقضي على الحشرات دون الحاق الضرر بالإنسان أو الحيوان فأنت لست بحاجة الى مغادرة مقر البخ و حتى الناشئين و الكهول و السقماء لن تضرهم المواد التي نستخدمها و التي تعتبر ايضاً صديقة للبيئة فقد حرصنا كل الحرص على سلامتك وسلامة أسرتك في جودة خامات مؤسسة مكافحة البق بمهد الذهب و الحشرات.
مؤسسة مكافحة الذباب بمهد الذهب
تعتبر شركتنا من أفضَل و كابر مؤسسات بخ المبيدات في الشرق الأوسط حيث أننا نتميز عن باقى مؤسسات بخ المبيدات بادخار الكثير من الخدمات المهمة ونقوم ببخ المبيدات المنزلية و مكافحة جميع أشكال الحشرات الطائرة كالذباب و البعوض و غيرها و الحشرات الزاحفة مثل النمل و الصراصير و العديد من الحشرات الأخرى كما أننا نتميز بالعديد من المميزات التي سوف نعددها لك لاحقا.
تختفي هذه الكائنات في النهار وتنشط بالليل بحثاً عن طعامها، ولها القدرة على الرؤية بالضوء الخافت، كما أنّ لديها أصابع سميكة ذات ملمس لزج تساعدها على الالتصاق بالجدران، مما يسبب الإزعاج لدى ربات المنزل، ومن الممكن التخلص منها بالعديد من الطرق الطبيعية والسهلة، وهذا ما سنعرفكم عليه في هذا المقال.
ReplyDeleteشركة رش مبيدات بحائل
شركة رش مبيدات بالاحساء
شركة رش مبيدات ببريدة
شركة رش مبيدات بابها
AVG Retail is the best Antivirus programming which is accessible on avg.com/retail , gives the total suite of highlights which can avg.com/retail verify your computerized on the web and disconnected work of the framework or gadgets.
ReplyDeleteفصل تيار التكييف بشكل نهائي عن المكيف
ReplyDeleteيتم العمل على ابعاد أشجار أو عشب بعيدًا عن جسم مكيف الهواء لمسافة 60 مترًا على الأقل.بعد التأكد من فصل التيار ، استخدم مفك براغي لإزالة المحرك الداخلي لمكيف الهواء.
يتم العمل على إزالة الجزء العلوي من التكييف مع الحرص على عدم تحريك أو إتلاف أي سلوك حتى لا تتسبب في أي خلل في التكييف.
إذا كان من السهل فك وتركيب المروحة ، غسيل المكيف الشباك في مكانه يمكنك أيضًا إزالتها لتجنب تلف المحرك.
اقرا المزيد على شركة ركن البستان للخدمات المنزلية
Thanks to the owner of this site who really shares this great work of this site. thanks for sharing. It often happens that the camera stops working in gotomeeting. So all you have to do is go to this link how to allow gotomeeting access camera on windows and find a solution.
ReplyDeleteThanks for sharing information on this upload. How did you get this information? Your website is very well designed, and I have read a few articles on it. I appreciate your efforts and encourage you to keep going. You may be interested in How fast you hit the spacebar key the latest article. Learn more about microphones here when you get started. See the article spacebar counter to learn more.
ReplyDeleteأفضل مكان لعلاج أورام الكبد بالإسكندرية
ReplyDeleteGreat explanation of convex hulls—this post makes a complex computer vision concept much easier to understand, especially with the OpenCV implementation examples and practical breakdown. Really useful for anyone exploring image processing and feature extraction. Also helpful for anyone looking for Statistics Assignment Help.
ReplyDeleteGreat discussion—online blog communities become much more engaging when readers actively share thoughtful ideas and perspectives in the comments section. Meaningful conversations like these help create stronger connections between writers and audiences. Also helpful for anyone looking for assignment help perth.
ReplyDeleteThese Southeast Asian destinations are truly remarkable. Whether you choose the Laos Tour Package,
ReplyDelete